

apollo介绍之Cyber框架(二)
关于cyber的代码也看了很长一段时间,之前一直想写一篇关于cyber的介绍,怎奈迟迟没有动笔,一是cyber的篇幅实在过长,二是有些方面也没有完全看懂。终于下定决心来写一篇cyber的长文已经到了11月份,cyber有很多我们值得学习的地方,就算是仅仅出于技术原因,我也非常推荐学习下cyber的源码。
由于cyber有些流程很长,导致看代码的时候喜欢画很复杂的流程图,实际上把图画长难,把图画小更难,百度apollo cyber的框图都很短小,但都直击要害,说出每个模块的具体功能。下面是简单的对比[1]。
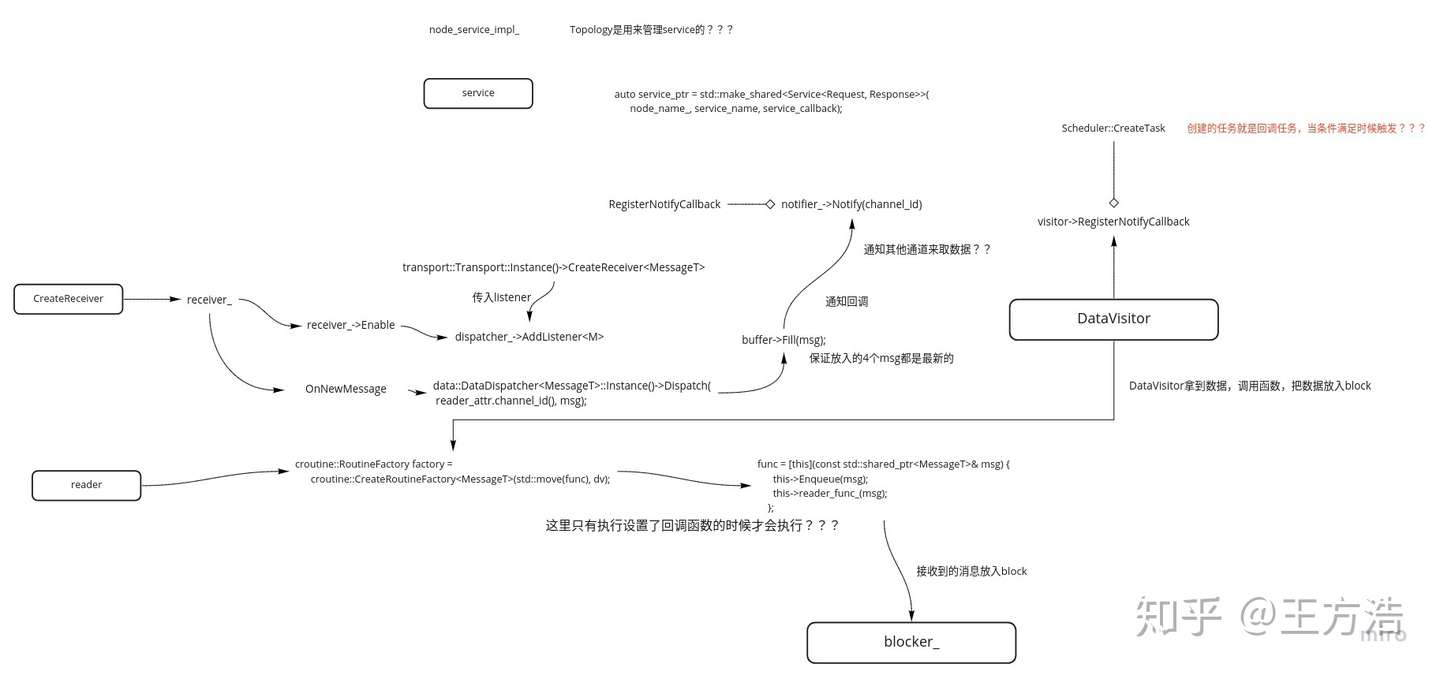
长流程图
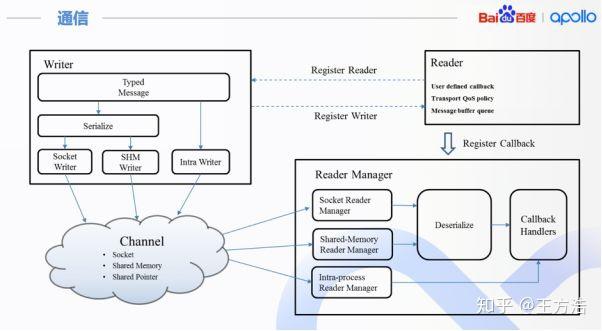
框图
Cyber实现的功能
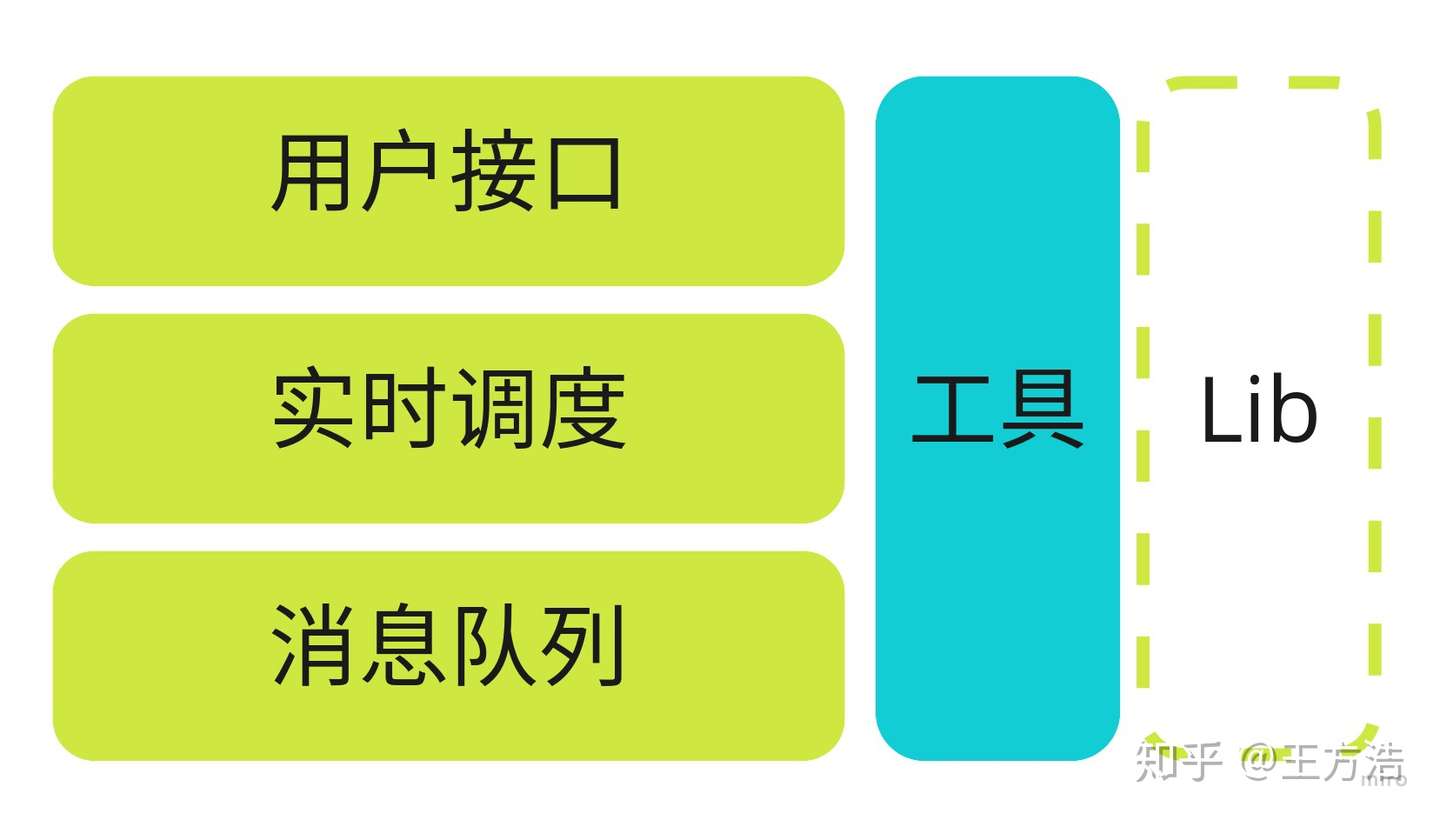
cyber提供的功能概括起来包括2方面:
- 消息队列- 主要作用是接收和发送各个节点的消息,涉及到消息的发布、订阅以及消息的buffer缓存等。
- 实时调度- 主要作用是调度处理上述消息的算法模块,保证算法模块能够实时调度处理消息。
除了这2方面的工作,cyber还需要提供以下2部分的工作:
- 用户接口- 提供灵活的用户接口
- 工具- 提供一系列的工具,例如bag包播放,点云可视化,消息监控等
总结起来就是,cyber是一个分布式收发消息,和调度框架,同时对外提供一系列的工具和接口来辅助开发和定位问题。其中cyber对比ROS来说有很多优势,唯一的劣势是cyber相对ROS没有丰富的算法库支持。
下面我们开始分析整个cyber的代码流程。
cyber入口
cyber的入口在"cyber/mainboard"目录中:
├── mainboard.cc // 主函数├── module_argument.cc // 模块输入参数├── module_argument.h├── module_controller.cc // 模块加载,卸载└── module_controller.h
mainboard中的文件比较少,也很好理解,我们先从"mainboard.cc"中开始分析:
int main(int argc, char **argv) {google::SetUsageMessage("we use this program to load dag and run user apps.");// 注册信号量,当出现系统错误时,打印堆栈信息signal(SIGSEGV, SigProc);signal(SIGABRT, SigProc);// parse the argument// 解析参数ModuleArgument module_args;module_args.ParseArgument(argc, argv);// initialize cyber// 初始化cyberapollo::cyber::Init(argv[0]);// start module// 加载模块ModuleController controller(module_args);if (!controller.Init()) {controller.Clear();AERROR << "module start error.";return -1;}// 等待cyber关闭apollo::cyber::WaitForShutdown();// 卸载模块controller.Clear();AINFO << "exit mainboard.";return 0;}
上述是"mainboard.cc"的主函数,下面我们重点介绍下具体的过程。
打印堆栈
在主函数中注册了信号量"SIGSEGV"和"SIGABRT",当系统出现错误的时候(空指针,异常)等,这时候就会触发打印堆栈信息,也就是说系统报错的时候打印出错的堆栈,方便定位问题[2]。
// 注册信号量,当出现系统错误时,打印堆栈信息signal(SIGSEGV, SigProc);signal(SIGABRT, SigProc);
打印堆栈的函数在"SigProc"中实现,而打印堆栈的实现是通过"backtrace"实现[3]。
// 打印堆栈信息void ShowStack() {int i;void *buffer[STACK_BUF_LEN];int n = backtrace(buffer, STACK_BUF_LEN);char **symbols = backtrace_symbols(buffer, n);AINFO << "=============call stack begin:================";for (i = 0; i < n; i++) {AINFO << symbols[i];}AINFO << "=============call stack end:================";}
解析参数
解析参数是在"ModuleArgument"类中实现的,主要是解析加载DAG文件时候带的参数。
void ModuleArgument::ParseArgument(const int argc, char* const argv[]) {// 二进制模块名称binary_name_ = std::string(basename(argv[0]));// 解析参数GetOptions(argc, argv);// 如果没有process_group_和sched_name_,则赋值为默认值if (process_group_.empty()) {process_group_ = DEFAULT_process_group_;}if (sched_name_.empty()) {sched_name_ = DEFAULT_sched_name_;}// 如果有,则设置对应的参数GlobalData::Instance()->SetProcessGroup(process_group_);GlobalData::Instance()->SetSchedName(sched_name_);AINFO << "binary_name_ is " << binary_name_ << ", process_group_ is "<< process_group_ << ", has " << dag_conf_list_.size() << " dag conf";// 打印dag_conf配置,这里的dag是否可以设置多个???for (std::string& dag : dag_conf_list_) {AINFO << "dag_conf: " << dag;}}
模块加载
在"ModuleController"实现cyber模块的加载,在"ModuleController::Init()"中调用"LoadAll()"来加载所有模块,我们接着看cyber是如何加载模块。
1. 首先是找到模块的路径
if (module_config.module_library().front() == '/') {load_path = module_config.module_library();} else {load_path =common::GetAbsolutePath(work_root, module_config.module_library());}
2. 通过"class_loader_manager_"加载模块,后面我们会接着分析"ClassLoaderManager"的具体实现,加载好对应的类之后在创建对应的对象,并且初始化对象(调用对象的Initialize()方法,也就是说所有的cyber模块都是通过Initialize()方法启动的,后面我们会接着分析Initialize具体干了什么)。
这里的"classloader"其实类似java中的classloader,即java虚拟机在运行时加载对应的类,并且实例化对象。
cyber中其实也是实现了类型通过动态加载并且实例化类的功能,好处是可以动态加载和关闭单个cyber模块(定位,感知,规划等),也就是在dreamview中的模块开关按钮,实际上就是动态的加载和卸载对应的模块。
// 通过类加载器加载load_path下的模块class_loader_manager_.LoadLibrary(load_path);// 加载模块for (auto& component : module_config.components()) {const std::string& class_name = component.class_name();// 创建对象std::shared_ptr<ComponentBase> base =class_loader_manager_.CreateClassObj<ComponentBase>(class_name);// 调用对象的Initialize方法if (base == nullptr || !base->Initialize(component.config())) {return false;}component_list_.emplace_back(std::move(base));}// 加载定时器模块for (auto& component : module_config.timer_components()) {const std::string& class_name = component.class_name();std::shared_ptr<ComponentBase> base =class_loader_manager_.CreateClassObj<ComponentBase>(class_name);if (base == nullptr || !base->Initialize(component.config())) {return false;}component_list_.emplace_back(std::move(base));}
上述就是cyber mainboard的整个流程,cyber main函数中先解析dag参数,然后根据解析的参数,通过类加载器动态的加载对应的模块,然后调用Initialize方法初始化模块。
下面我们会接着分析ClassLoaderManager
类加载器(class_loader)
类加载器的作用就是动态的加载动态库,然后实例化对象。我们先来解释下,首先apollo中的各个module都会编译为一个动态库,拿planning模块来举例子,在"planning/dag/planning.dag"中,会加载:
module_config {module_library : "/apollo/bazel-bin/modules/planning/libplanning_component.so"
也就是说,apollo中的模块都会通过类加载器以动态库的方式加载,然后实例化,之后再调用Initialize方法初始化。也就是说,我们讲清楚下面3个问题,也就是讲清楚了类加载器的原理。
- cyber如何加载apollo模块?
- 如何实例化模块?
- 如何初始化模块?
目录结构
类加载器的实现在"cyber/class_loader"目录中,通过"Poco/SharedLibrary.h"库来实现动态库的加载,关于Poco动态库的加载可以[参考](Class Poco::SharedLibrary)
├── BUILD // 编译文件├── class_loader.cc // 类加载器├── class_loader.h├── class_loader_manager.cc // 类加载器管理├── class_loader_manager.h├── class_loader_register_macro.h // 类加载器注册宏定义└── utility├── class_factory.cc // 类工厂├── class_factory.h├── class_loader_utility.cc // 类加载器工具类└── class_loader_utility.h
类加载器(ClassLoader)
我们先从"class_loader.h"开始看起,首先我们分析下"class_loader"实现的具体方法:
class ClassLoader {public:explicit ClassLoader(const std::string& library_path);virtual ~ClassLoader();// 库是否已经加载bool IsLibraryLoaded();// 加载库bool LoadLibrary();// 卸载库int UnloadLibrary();// 获取库的路径const std::string GetLibraryPath() const;// 获取累名称template <typename Base>std::vector<std::string> GetValidClassNames();// 实例化类对象template <typename Base>std::shared_ptr<Base> CreateClassObj(const std::string& class_name);// 类是否有效template <typename Base>bool IsClassValid(const std::string& class_name);private:// 当类删除template <typename Base>void OnClassObjDeleter(Base* obj);private:// 类的路径std::string library_path_;// 类加载引用次数int loadlib_ref_count_;// 类加载引用次数锁std::mutex loadlib_ref_count_mutex_;// 类引用次数int classobj_ref_count_;// 类引用次数锁std::mutex classobj_ref_count_mutex_;};
可以看到类加载器主要是提供了加载类,卸载类和实例化类的接口。实际上加载类和卸载类的实现都比较简单,都是调用"utility"类中的实现,我们暂时先放一边,先看下实例化对象的实现。
template <typename Base>std::shared_ptr<Base> ClassLoader::CreateClassObj(const std::string& class_name) {// 加载库if (!IsLibraryLoaded()) {LoadLibrary();}// 根据类名称创建对象Base* class_object = utility::CreateClassObj<Base>(class_name, this);// 类引用计数加1std::lock_guard<std::mutex> lck(classobj_ref_count_mutex_);classobj_ref_count_ = classobj_ref_count_ + 1;// 指定类的析构函数std::shared_ptr<Base> classObjSharePtr(class_object, std::bind(&ClassLoader::OnClassObjDeleter<Base>, this,std::placeholders::_1));return classObjSharePtr;}
可以看到创建类的时候,类引用计数加1,并且绑定类的析构函数(OnClassObjDeleter),删除对象的时候让类引用计数减1。
template <typename Base>void ClassLoader::OnClassObjDeleter(Base* obj) {if (nullptr == obj) {return;}std::lock_guard<std::mutex> lck(classobj_ref_count_mutex_);delete obj;--classobj_ref_count_;}
我们先简单的分析下ClassLoaderManager,最后再分析utility。
ClassLoaderManager
类加载器管理实际上是管理不同的classloader,而不同的libpath对应不同的classloader。ClassLoaderManager主要的数据结构其实如下:
std::map<std::string, ClassLoader*> libpath_loader_map_;
其中"libpath_loader_map_"为map结构,在"LoadLibrary"的时候赋值,key为library_path,而value为ClassLoader.
bool ClassLoaderManager::LoadLibrary(const std::string& library_path) {std::lock_guard<std::mutex> lck(libpath_loader_map_mutex_);if (!IsLibraryValid(library_path)) {// 赋值libpath_loader_map_[library_path] =new class_loader::ClassLoader(library_path);}return IsLibraryValid(library_path);}
也就是说"ClassLoaderManager"对ClassLoader进行保存和管理。
