

apollo简易制图过程(二十)
之前介绍了高精度地图制作和采集流程,正常的制图流程比较繁琐,这里主要介绍下apollo的简易制图过程,只需要rtk定位就可以制作一个简单的高精度地图。下面主要分享下制作过程。
制图工具
制图工具在"apollo/modules/tools/map_gen"目录下,主要的文件如下:
制图的步骤如下
- 先通过"extract_path.py"读取bag包中录取的车辆轨迹,原理是订阅"/apollo/localization/pose"中的消息,然后保存到文件。
- 然后通过"map_gen.py"读取生成的车辆轨迹,生成高精度地图,原理是把录制的轨迹当做车道中心线,进行采样,然后保存成Apollo的高精度地图格式。
下面再介绍下其它的2个制作工具
map_gen_single_lane.py 读取文件中的轨迹,生成1条车道线(lane),和"map_gen.py"的区别是,它只会生成single_lane。
map_gen_two_lanes_right_ext.py 读取文件中的轨迹,和map_gen_single_lane.py的区别是会生成2条车道线。
和map_gen的区别需要进一步研究
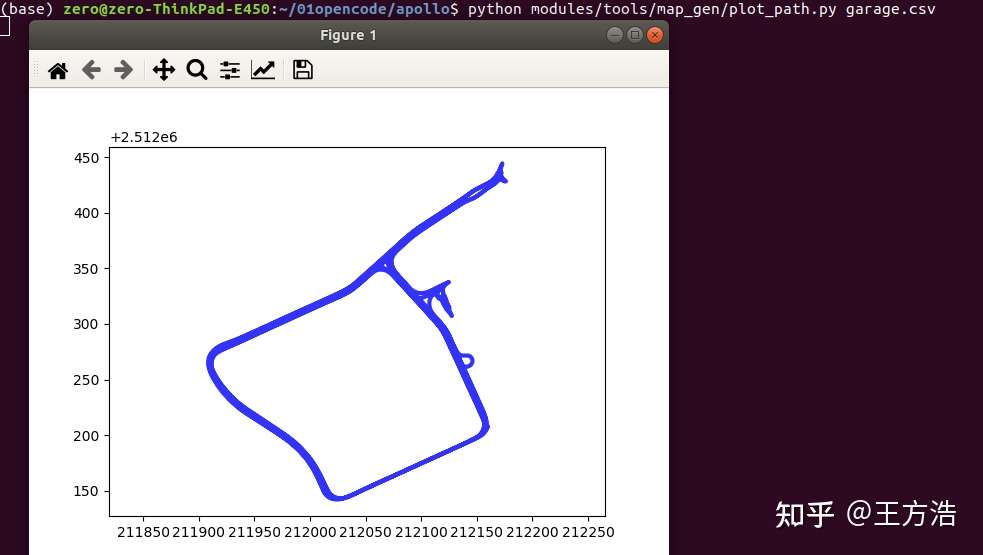
预览录制的轨迹
通过"extract_path.py"解压好轨迹之后,可以通过plot_path.py来可视化录制的轨迹。
python modules/tools/map_gen/plot_path.py path.txt
生成好的地图
进入容器,编译地图生成工具。
bazel build modules/tools/map_gen:all./bazel-bin/modules/tools/map_gen/map_gen path.txt
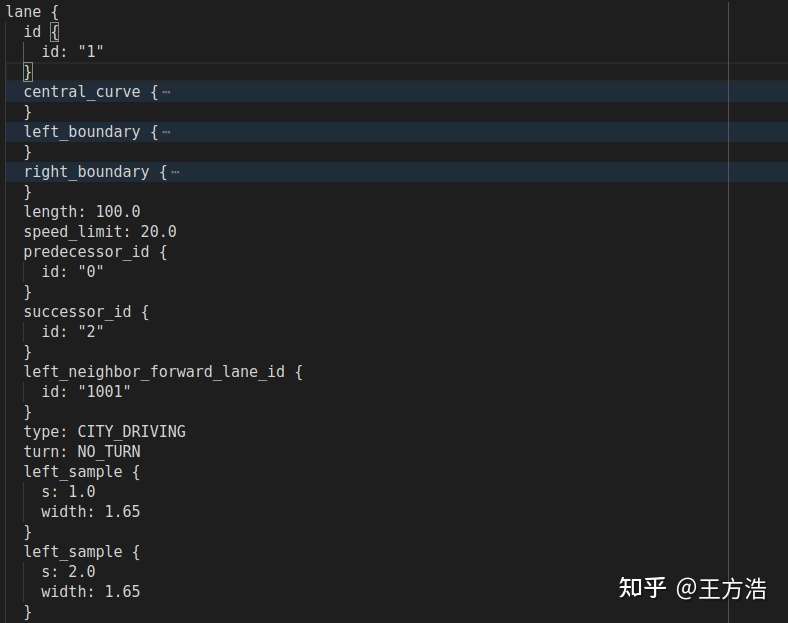
生成好的地图格式如下
添加红绿灯信息
生成好地图之后,可以通过"add_signal.py"来添加红绿灯。
./bazel-bin/modules/tools/map_gen/add_signal.py map_file your_signal_map
这里map_file就是刚才生成的地图文件,而your_signal_map是红绿灯的文件,红绿灯文件实际上就是apollo hdmap中指定的红绿灯格式,也就是说你需要按照apollo hdmap中指定的红绿灯格式保存红绿灯的数据,然后把它添加到map_file中。
查看生成好的地图
查看生成好的地图有2种方式,一种是通过mapviewers,一种是通过mapshow,这里只验证了mapshow。
先在apollo容器中编译mapshow。
bazel build modules/tools/mapshow:all
因为在容器中不能显示图形界面,因此在容器外运行以下命令,会提示如下错误:
root@in-dev-docker:/apollo# ./bazel-bin/modules/tools/mapshow/mapshow -m your_map_name/apollo/./bazel-bin/modules/tools/mapshow/mapshow.runfiles/apollo/modules/tools/mapshow/mapshow.py:119: UserWarning: Matplotlib is currently using agg, which is a non-GUI backend, so cannot show the figure.plt.show()
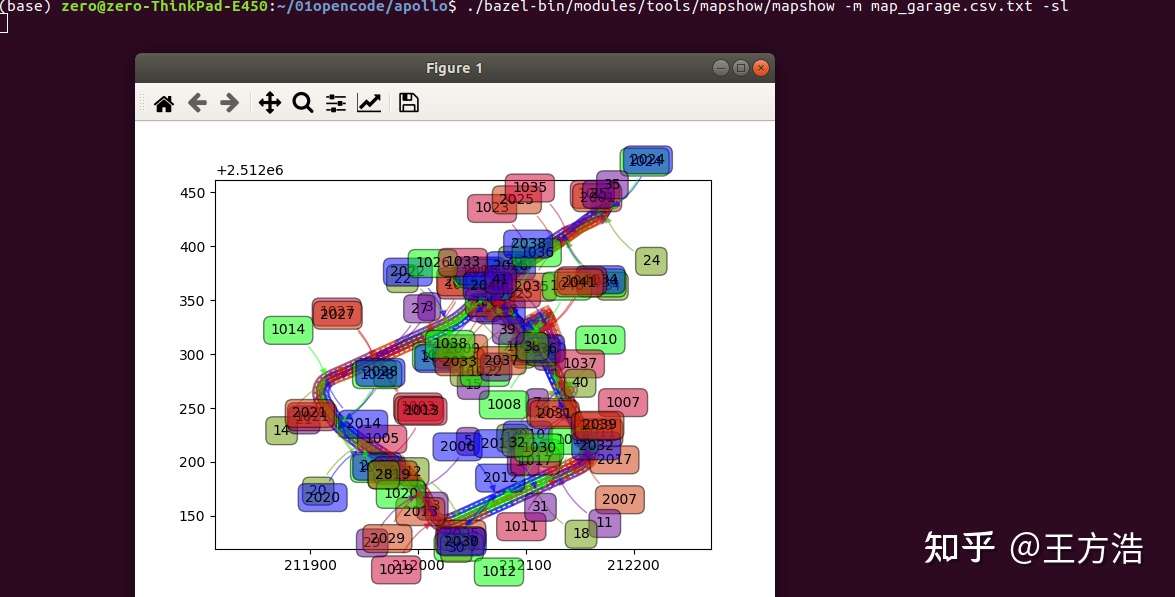
最后,在容器外的apollo目录中执行
./bazel-bin/modules/tools/mapshow/mapshow -m your_map_name -sl
就可以看到如下画面了,就是生成好的高精度地图。
完整制作地图过程
以下是python版本的制图过程,需要apollo5.0之前的版本
1. 解压制作好的地图
python modules/tools/map_gen/extract_path.py points data/bag/20210406112554.record.00000
查看当前轨迹
python modules/tools/map_gen/plot_path.py points
2. 生成地图
pythonmodules/tools/map_gen/map_gen.pypoints
3. 查看地图
python modules/tools/mapshow/mapshow.py -m map_points.txt
生成地图
python modules/tools/create_map/convert_map_txt2bin.py -i map_points.txt -o /apollo/modules/map/data/your_map_dir/base_map.bin
生成sim_map
./bazel-bin/modules/map/tools/sim_map_generator -map_dir=/apollo/modules/map/data/your_map_dir -output_dir=/apollo/modules/map/data/your_map_dir
生成routing_map
./bazel-bin/modules/routing/topo_creator/topo_creator -map_dir=/apollo/modules/map/data/your_map_dir --flagfile=modules/routing/conf/routing.conf
修改--map_dir=/apollo/modules/map/data/your_map_dir
测试之前需要修改"vi modules/common/data/global_flagfile.txt",屏蔽选项"--log_dir/--use_navigation_mode"
--map_dir=/apollo/modules/map/data/your_map_dir
测试生成的routing_map是否可以联通
pythonmodules/tools/routing/debug_topo.py
