

科创赛事丨赛题解析之左转待转
2022-10-14 02:1526771180
赛题描述
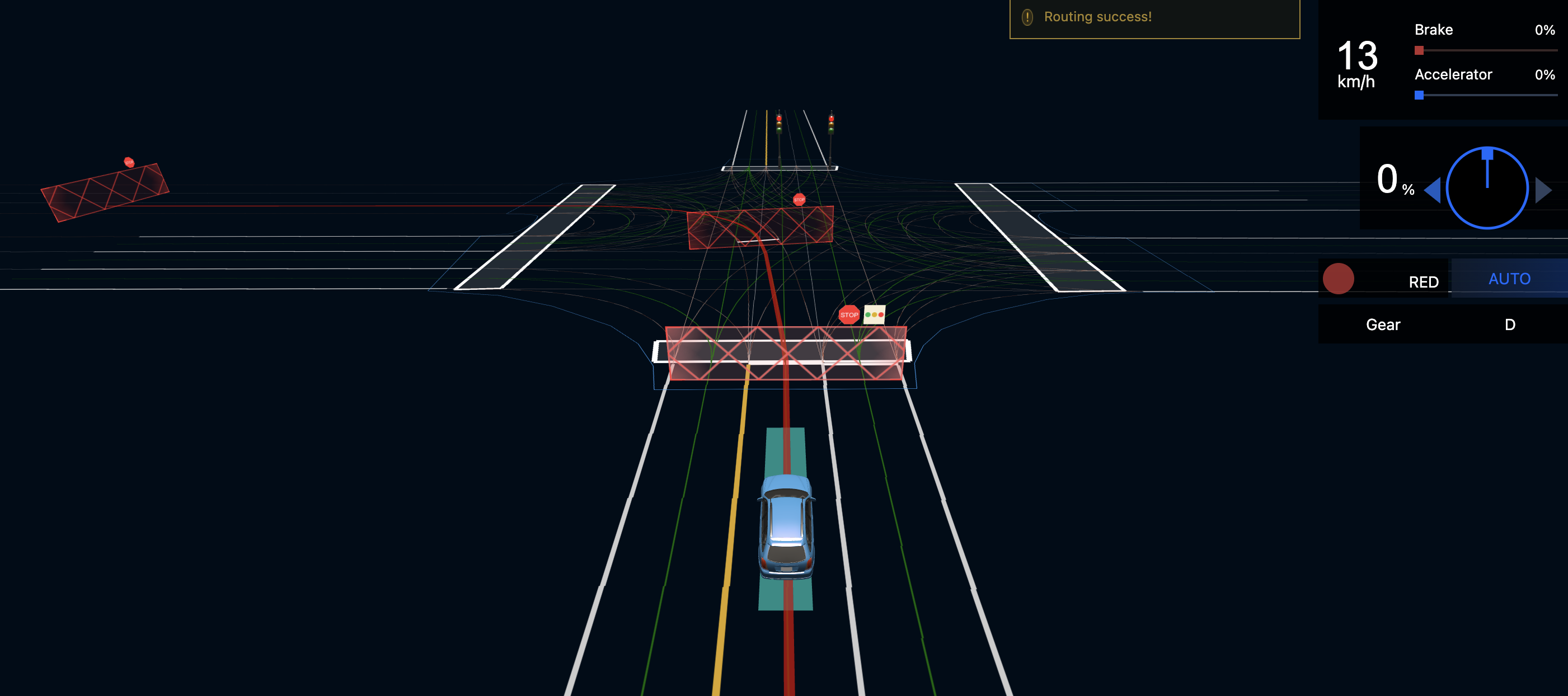
当自动驾驶车辆行驶至十字路口时,若直行及左转灯均为红灯时,主车停车在停止线2-2.2米之内;当直行变为绿灯,左转红灯时,主车驶入待转区;直行变为红灯,左转绿灯时候,主车驶出左转待转区,进入左转道。
场景图示
评判标准
当自动驾驶车辆行驶至十字路口时,若直行及左转灯均为红灯时,主车停止在停止线2-2.2米之内;当 直行变为绿灯,左转红灯时,主车15s内未进入待转区或行驶超出待转区,本场景分计0分;直行变为红灯,左转绿灯时候,主车未驶出左转待转区,进入左转道,本场景分计0分。本场景规定通行时间为90秒。
碰撞检测规范:如果主车到障碍物的距离<=0.1,视为发生碰撞。
在路检测规范:要求主车在行驶过程中必须在路(白线范围内),超出白色则视为非在路。
车辆静止状态:车速小于0.1m/s即视为车辆静止(请参赛者务必注意此条件,前期很多同学评测不得分都是车辆未完全静止导致)
评测参考
解题思路
首先,各位同学需要在apollomap下的base_map.txt里面找到左转停止线(stop_line)的坐标位置。
stop_line {segment {line_segment {point {x: 750972.57867658127y: 2563990.9899958805}point {x: 750970.86382346111y: 2563990.6154060815}point {x: 750969.1592123817y: 2563990.2409889824}}
其次,可参考modules > planing > conf > scenario > traffic_light_unprotected_left_turn_config.pb.txt 的实现方法自行创建左转待转的场景,详情请参考视频解析。
视频教程
如果各位同学对于本题还有疑问,可在下方评论区域提问,预祝各位比赛顺利。
来自专栏
带你玩转自动驾驶竞赛查看专栏 >
原创声明,本文由作者授权发布于Apollo开发者社区,未经许可,不得转载。
发表评论已发表 0 条评论
登录后可评论,请前往 登录
暂无评论~快去发表自己的独特见解吧!

目录
赛题描述
场景图示
评判标准
评测参考
解题思路
视频教程