

apollo介绍之Canbus模块(八)
Canbus模块介绍
我们先看下什么是Canbus: 控制器局域网 (Controller Area Network,简称CAN或者CAN bus) 是一种车用总线标准。被设计用于在不需要主机(Host)的情况下,允许网络上的节点相互通信。采用广播机制,并利用标识符来定义内容和消息的优先顺序,使得canbus的扩展性良好,同时不基于特殊类型(Host)的节点,增加了升级网络的便利性。
这里的Canbus模块其实可以称为Chassis模块,主要的作用是反馈车当前的状态(航向,角度,速度等信息),并且发送控制命令到车线控底盘,可以说Canbus模块是车和自动驾驶软件之间的桥梁。由于这个模块和"drivers/canbus"的联系紧密,因此也一起在这里介绍。
Canbus模块是车和自动驾驶软件之间的桥梁,通过canbus驱动(drivers/canbus)来实现将车身信息发送给apollo上层软件,同时接收控制命令,发送给汽车线控底盘实现对汽车的控制。
那么canbus模块的输入是什么?输出是什么呢?
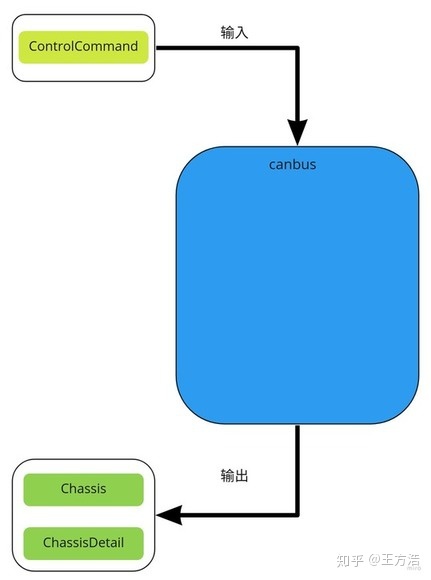
可以看到canbus模块:
- 输入- 1. ControlCommand(控制命令)
- 输出- 1. Chassis(汽车底盘信息), 2. ChassisDetail(汽车底盘信息详细信息)
Canbus模块的输入是control模块发送的控制命令,输出汽车底盘信息,这里apollo的上层模块被当做一个can_client来处理,实现接收和发送canbus上的消息。
Canbus模块的目录结构如下:
├── BUILD // bazel编译文件├── canbus_component.cc // canbus主入口├── canbus_component.h├── canbus_test.cc // canbus测试├── common // gflag配置├── conf // 配置文件├── dag // dag依赖├── launch // launch加载├── proto // protobuf文件├── testdata // 测试数据├── tools // 遥控汽车和测试canbus总线工具└── vehicle //
接着我们来分析下Canbus模块的执行流程。
Canbus模块主流程
Canbus模块的主流程在文件"http://canbus_component.cc"中,canbus模块为定时触发,每10ms执行一次,发布chassis信息,而ControlCommand则是每次读取到之后触发回调"OnControlCommand",发送"control_command"到线控底盘。
bool CanbusComponent::Proc() {PublishChassis();if (FLAGS_enable_chassis_detail_pub) {PublishChassisDetail();}return true;}
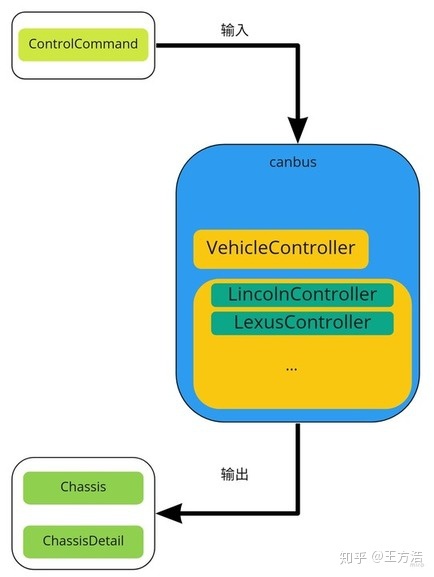
由于不同型号的车辆的canbus命令不一样,在"/vehicle"中适配了不同型号车辆的canbus消息格式,所有的车都继承自Vehicle_controller基类,通过对Vehicle_controller的抽象来发送和读取canbus信息。
车辆工厂模式(VehicleFactory)
在vehicle中可以适配不同的车型,而每种车型都对应一个vehicle_controller,创建每种车辆的控制器(VehicleController)和消息管理(MessageManager)流程如下:
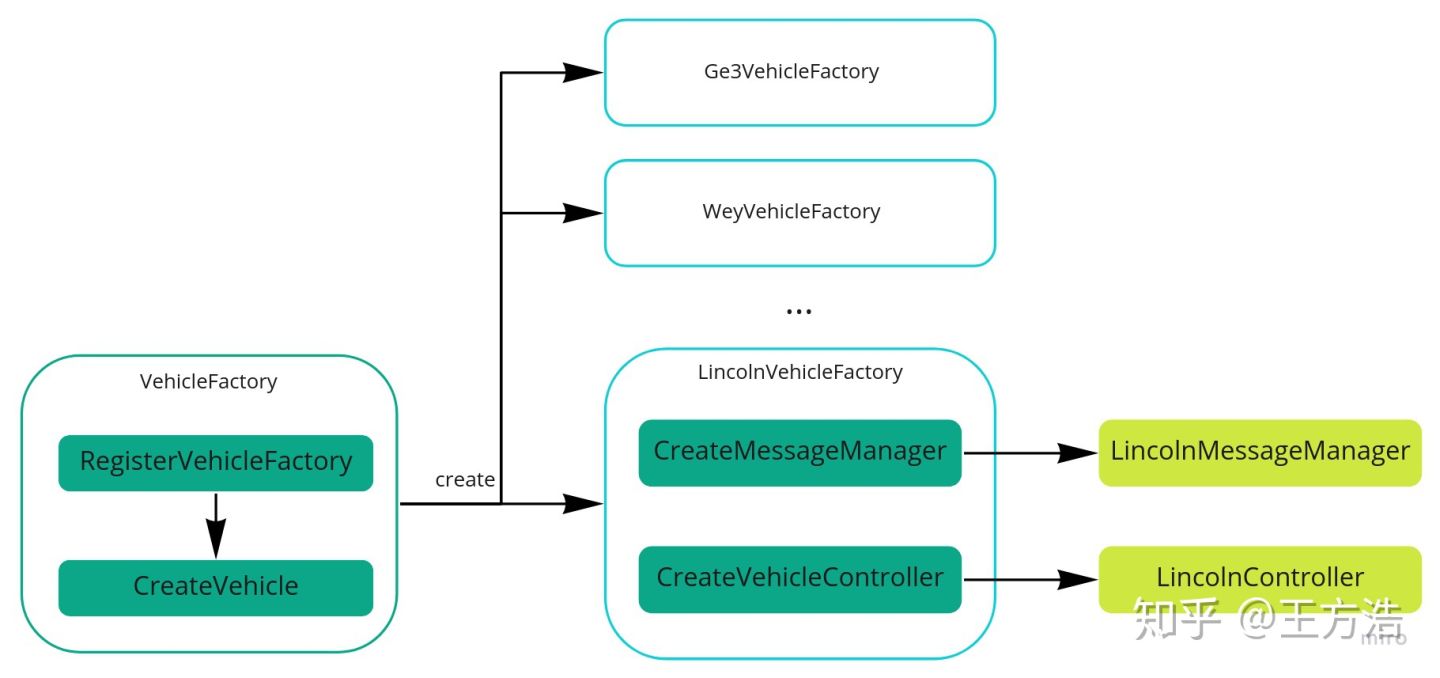
VehicleFactory类通过创建不同的类型AbstractVehicleFactory,每个车型自己的Factory在创建出对应的VehicleController和MessageManager,用林肯来举例子就是: VehicleFactory创建LincolnVehicleFactory,之后通过CreateMessageManager和CreateVehicleController创建对应的控制器(LincolnController)和消息管理器(LincolnMessageManager)。
上述代码流程用到了设计模式的工厂模式,通过车辆工厂创造不同的车辆类型。
车辆控制器(LincolnController)
下面以林肯来介绍LincolnController,以及如何接收chassis信息,其它的车型可以以此类推,下面主要分为2部分介绍,第一部分为controller的init->start->stop流程,第二部分为chassis信息获取:
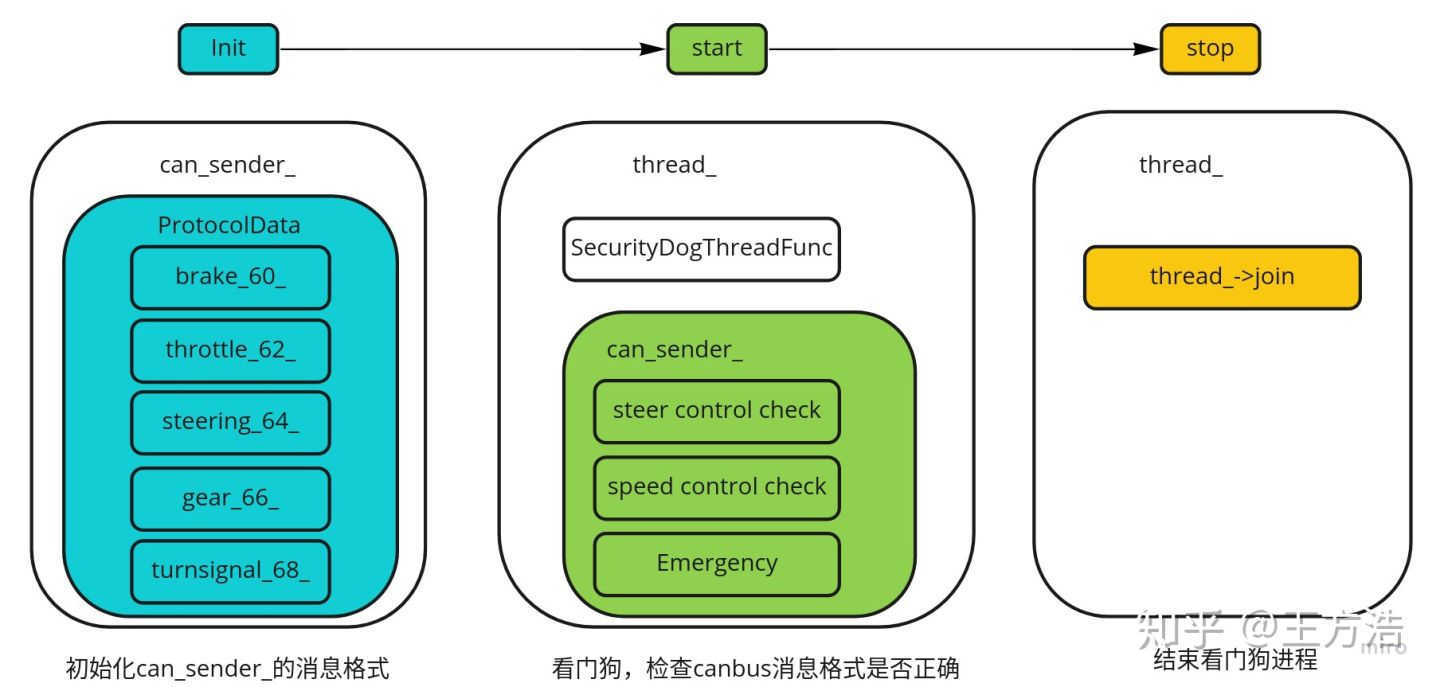
可以看到control模块初始化(init)的过程获取了发送的消息的格式,通过can_sender应该发送那些消息,而启动(start)之后启动一个看门狗,检查canbus消息格式是否正确,最后关闭(stop)模块则是结束看门狗进程。
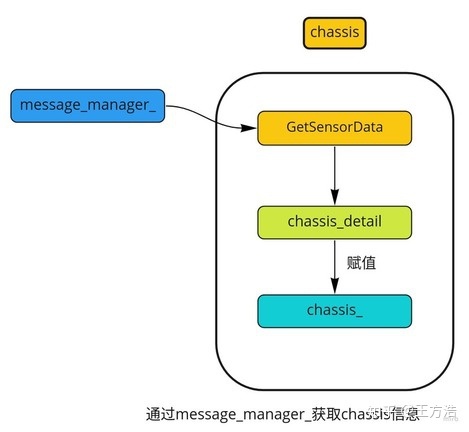
而chassis的获取则是通过message_manager_获取chassis_detail,之后对chassis进行赋值。
Canbus(驱动程序)
上层的canbus就介绍完成了,而canbus的发送(CanSender)和接收(CanReceiver),还有消息管理(MessageManager)都是在"drivers/canbus"中实现的。
消息管理器(MessageManager)
MessageManager是如何获取消息的呢?
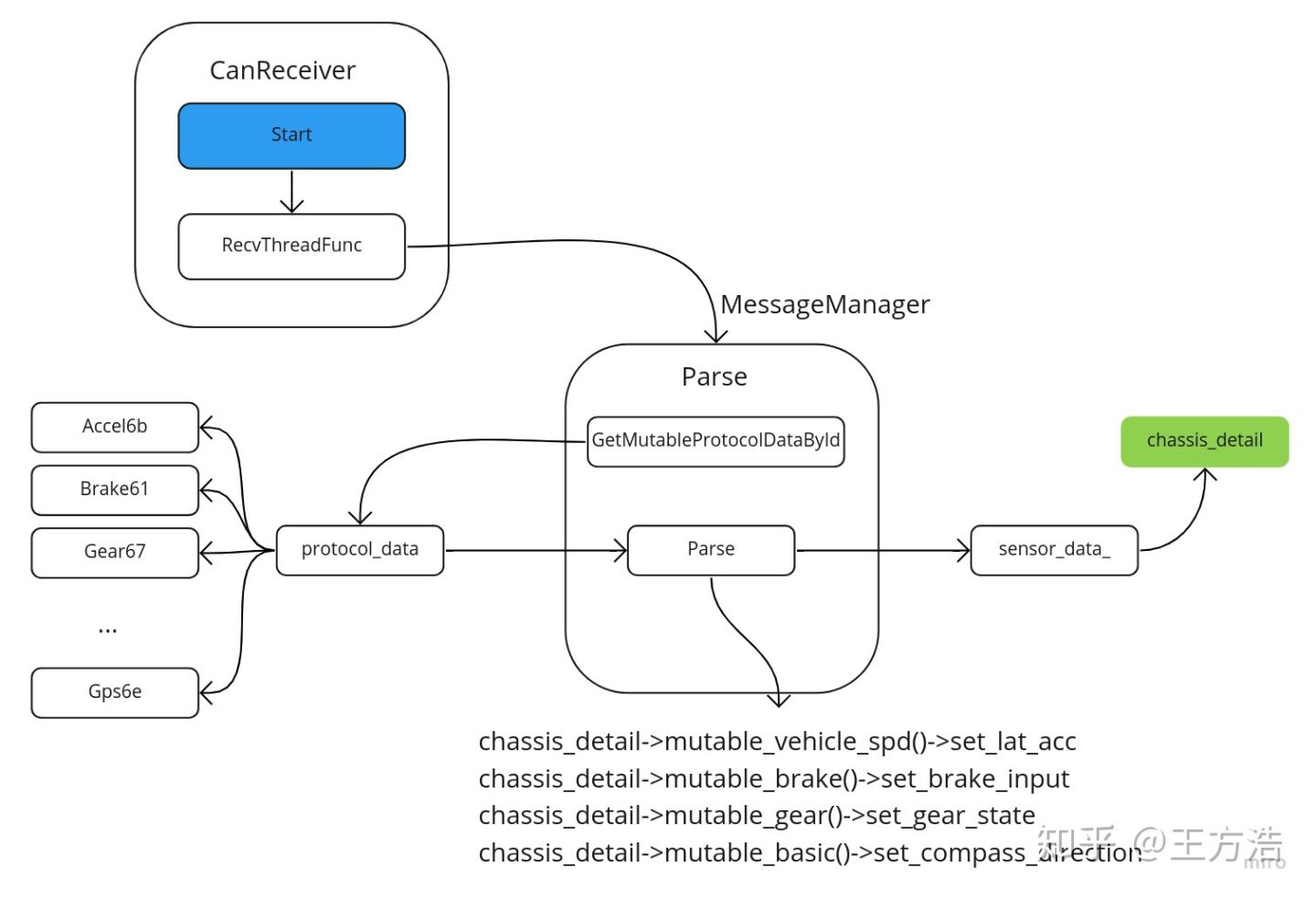
MessageManager主要作用是解析和保存canbus数据,而具体的接收和发送则是在"CanReceiver"和"CanSender"中,拿接收消息举例子,也就是说CanReceiver收到消息后,会调用MessageManager中的parse去解析消息,消息的解析协议在"modules/canbus/vehicle/lincoln/protocol"中,每个消息把自己对应的信息塞到"chassis_detail"中完成了消息的接收。
消息接收(CanReceiver)
canbus消息的接收在上面有介绍,在CanReceiver中的"Start"调用"RecvThreadFunc"实现消息的接收,这里会启动一个异步进程去完成接收。
template <typename SensorType>::apollo::common::ErrorCode CanReceiver<SensorType>::Start() {if (is_init_ == false) {return ::apollo::common::ErrorCode::CANBUS_ERROR;}is_running_.exchange(true);// 启动异步接收消息async_result_ = cyber::Async(&CanReceiver<SensorType>::RecvThreadFunc, this);return ::apollo::common::ErrorCode::OK;}
RecvThreadFunc通过"can_client_"接收消息,然后通过"MessageManager"去解析消息,在MessageManager中有讲到。
template <typename SensorType>void CanReceiver<SensorType>::RecvThreadFunc() {...while (IsRunning()) {std::vector<CanFrame> buf;int32_t frame_num = MAX_CAN_RECV_FRAME_LEN;// 1. can_client_接收canbus数据if (can_client_->Receive(&buf, &frame_num) !=::apollo::common::ErrorCode::OK) {cyber::USleep(default_period);continue;}...for (const auto &frame : buf) {uint8_t len = frame.len;uint32_t uid = frame.id;const uint8_t *data = frame.data;// 2. MessageManager解析canbus数据pt_manager_->Parse(uid, data, len);if (enable_log_) {ADEBUG << "recv_can_frame#" << frame.CanFrameString();}}cyber::Yield();}AINFO << "Can client receiver thread stopped.";}
消息发送(CanSender)
消息发送对应的是在CanSender中的"Start"调用"PowerSendThreadFunc",我们可以看具体实现:
template <typename SensorType>common::ErrorCode CanSender<SensorType>::Start() {if (is_running_) {AERROR << "Cansender has already started.";return common::ErrorCode::CANBUS_ERROR;}is_running_ = true;// 启动线程发送消息thread_.reset(new std::thread([this] { PowerSendThreadFunc(); }));return common::ErrorCode::OK;}
PowerSendThreadFunc再通过"can_client"发送消息:
std::vector<CanFrame> can_frames;CanFrame can_frame = message.CanFrame();can_frames.push_back(can_frame);// 通过can_client发送消息if (can_client_->SendSingleFrame(can_frames) != common::ErrorCode::OK) {AERROR << "Send msg failed:" << can_frame.CanFrameString();}
canbus客户端(CanClient)
CanClient是canbus客户端,同时也是canbus的驱动程序,针对不同的canbus卡,对发送和接收进行封装,并且提供给消息发送和接收控制器使用。
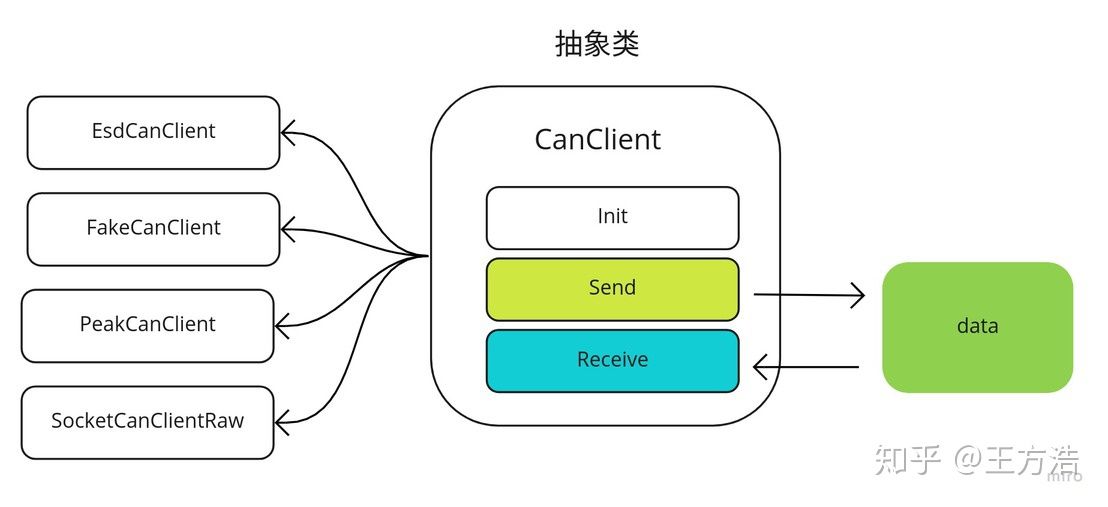
拿"EsdCanClient"来举例子,发送在"Send"函数中,调用的是第三方的硬件驱动,目录在"third_party/can_card_library/esd_can",实现can消息的发送:
ErrorCode EsdCanClient::Send(const std::vector<CanFrame> &frames,int32_t *const frame_num) {...// canWrite为第三方库的硬件驱动,third_party/can_card_library/esd_can// Synchronous transmission of CAN messagesint32_t ret = canWrite(dev_handler_, send_frames_, frame_num, nullptr);if (ret != NTCAN_SUCCESS) {AERROR << "send message failed, error code: " << ret << ", "<< GetErrorString(ret);return ErrorCode::CAN_CLIENT_ERROR_BASE;}return ErrorCode::OK;}
其他的can卡可以参考上述的流程,至此整个canbus驱动就分析完成了。
